Fleet
Aquatic Autonomous Systems
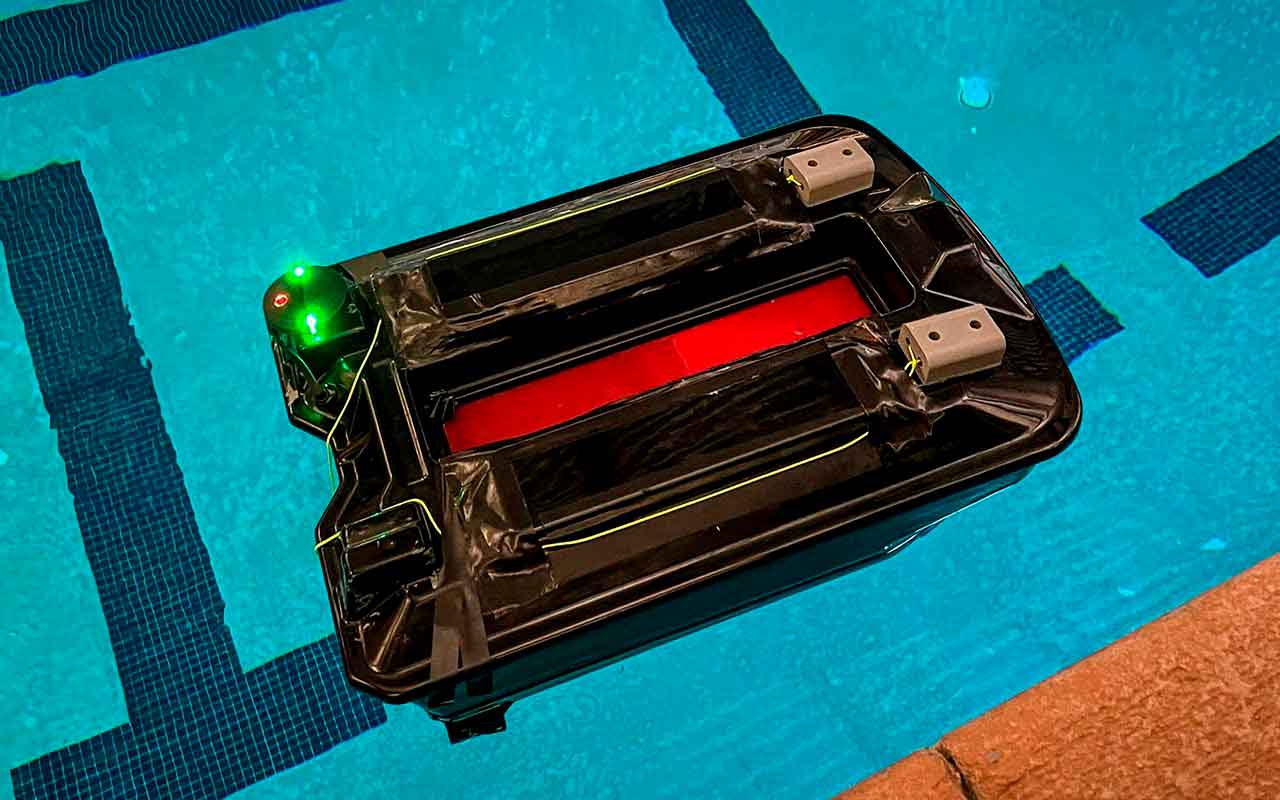
Smart Vehicle for Aquatic Long Term and Autonomous Missions (SVALTAM)
The SVALTAM is a reliable platform to generate underwater terrain maps with self-governing commands. As an Unmanned Surface Vehicle that can be used for multiple applications due to its flexible capabilities. The boat has a rectangular lightweight aluminum structure with four TP200 Thrusters controlled by speed drivers. This configuration allows the vehicle to perform omnidirectional movements, perfect to explore shallow waters, hard to reach, or dangerous areas.
The system is powered by a Lifepo4 Battery Lithium-Ion that is constantly charged by a 50W solar panel, the integration of the photovoltaic (PV) system enables the possibility to complete long-term missions. With an inner tube as a redundant floating system. The Pixhawk 2.1 is the main controller, integrated to provide navigation and control solutions. It has an RFD900+ telemetry modem for remote data transmission with a line of sight range up to 40 km and a frequency band of 902MHz. A GPS Here + RTK, Accelerometer, and Gyroscope are combined to improve the location and navigation competencies. The main payload is the River Surveyor M9, an accurate Acoustic Doppler Profiler (ASP) system, that poses a nine-beam system with a profiling range from 0.2 m to 30 m. Additionally, a microprocessor (Raspberry Pi 4) is incorporated to control the power system, monitors crucial signals, and deploy failsafe commands. The Raspberry Pi 4 communicates to the Pixhawk 2.1 to enhance the capabilities of the platform to cover the largest area possible without incidents.

Autonomous System for Intelligence Marine Applications (ASIMA)
The ASIMA is a maritime vehicle perfect for surveillance in harbors and coastal waters. It poses a catamaran structure with two TP200 Thrusters. This design allows the vehicle to perform well in ponds and lakes. Ideal for scientific research, environmental missions, and water resource exploration.
The power system is built by a high-capacity lithium-polymer battery with a rating power bank of 5200 mAh and voltage drop of 14.8 V. The Pixhawk 2.1 is the main navigation controller. It poses an RFD900+ telemetry modem for remote data transmission with a line of sight range up to 40 km and a frequency band of 902MHz. A GPS Here +, Accelerometer, and Gyroscope are combined to improve the location and guidance capabilities. Different sensors can be attached as a payload to collect meaningful data for scientists.
Aerial Autonomous Systems
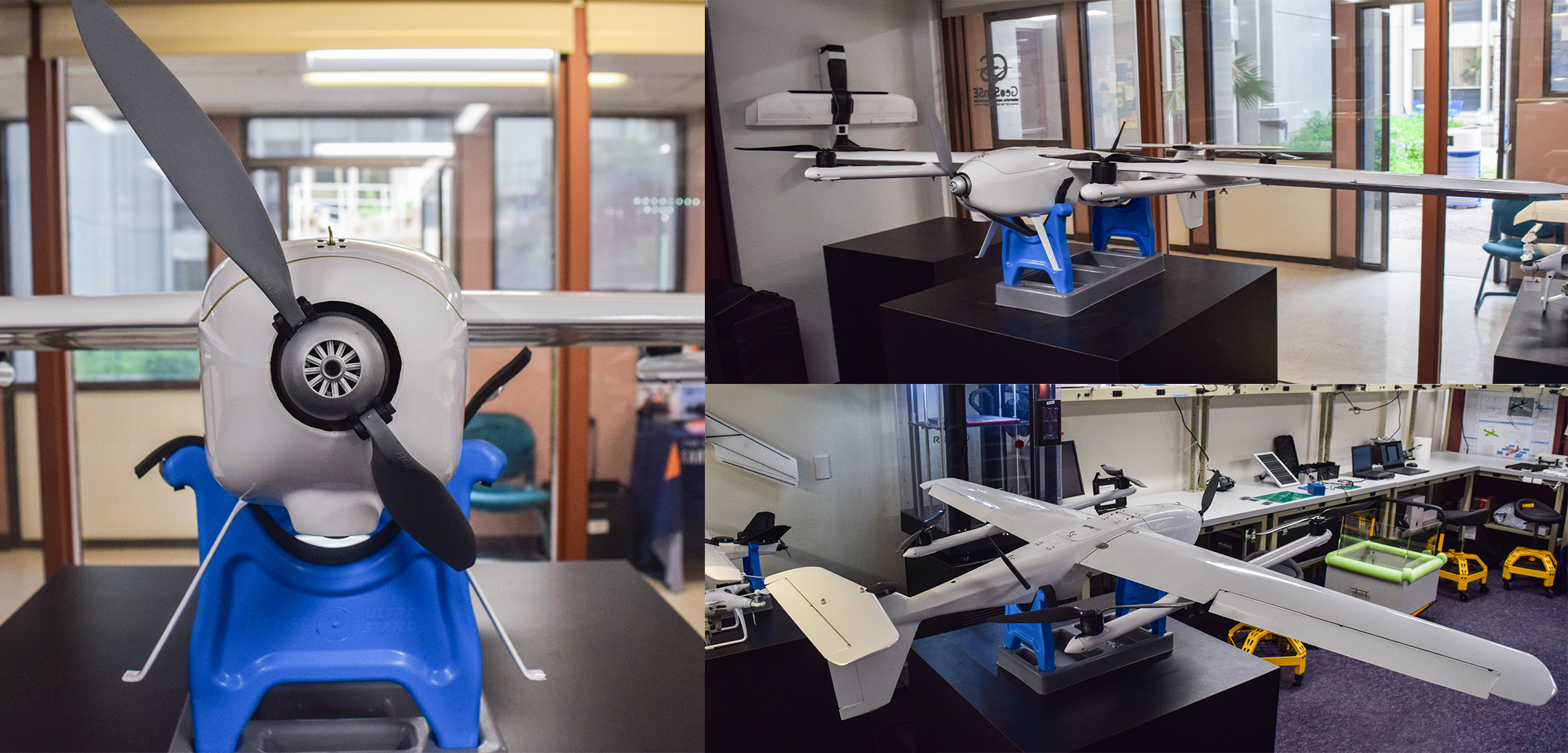
Flydragon VTOL
The Flydragon FDG23 is a Vertical Take off and Landing (VTOL) aircraft designed for aerial mapping. The Flydragon is specially designed to cover a 12 km2 area with a 90 min flight. Additionally, centimeter level positioning can be achieved after equipping with RTK. Similarly, PPK mapping also can be done. The high performance of the aircraft is due to its unique design from composite lightweight materials and low air resistance. Maximum take-off weight can reach up to and the endurance time is 160 minutes with no payload. The aircraft withstands 5.5m/s - 7.9m/s (12.5mph-17.5mph) wind. Thus, it can perform aerial missions in complex situations. The GPS module is mounted on the tail wing away from the power system, which greatly reduces interference. Further, the specifications of the Flydragon FDG23 VTOL are as follows:
Wingspan: 2300mm, Fuselage: 1200mm, Material: Composite Material, ARF Weight: 3.6kg (no battery, no payload), Max. Take-off Weight: 8kg, Suggested Max Payload: 1.5kg(excluding battery), Endurance: 160 min (1x 6S 30000mAh no payload), 120 min(1x 6S 30000mAh 500g payload), Recommended Cruising Speed: 18-20m/s, Stall Speed: 12-14m/s, Suggested Take-off Altitude: 0~3000m, Wind Resistance: 5.5 m/s-7.9 m/s (12.5mph-17.5mph), Take-off/Landing: VTOL, Working Voltage: 24V, Working Temperature: -10℃-40℃
Topodrone Fixed-Wing
A Topodrone Fixed-Wing small Unmanned Aerial System (sUAS) and a multispectral camera are employed for topographic surveying. This sUAS is a commercial-grade aerial mapping camera platform designed for the Pixhawk autopilot and carries a RedEdge multispectral camera. This multispectral camera records aerial photographs in the RGB, red edge, and near-IR spectral bands. The Ground Sample Distance (GSD) is 8 cm per pixel per band at 120 m above ground and the capture rate is 1 capture per second (all bands), 12-bit RAW. This sUAS mapper weights a maximum of 2kg with an endurance of 40 minutes, a minimum airspeed of 17 meters per second, and a maximum safe survey area per flight of 1km² while flying 100 meters altitude. This sUAS mapper was enhanced by the Center of Autonomous Sensing and Sampling (CASS). A Piksi Multi GNSS Module replaces the default tuffwing GPS. Piksi Multi is a multi-band, multi-constellation RTK GNSS receiver that provides centimeter-level accuracy at a low cost. The satellite system covers a total of four global systems including the GLONASS (built by Russia), BeiDou (China) and Galileo (Europe), and regional system Japan's QZSS) the global satellite. Mission planner autopilot flight planning software was used for UAS image acquisition in both surveys.
DJI Phantom 4 Pro
A DJI Phantom 4 Professional quadcopter and a compact RGB digital camera of 12.4-megapixel resolution and 1/1.3" CMOS sensor was employed. The DJI Phantom 3 Professional quadcopter is a small commercial unmanned aircraft. It weighs 1280 g including battery and propellers. The Satellite Positioning System employs a GPS/GLONASS with a compass accuracy ranging between 1m to 5m. The vertical and horizontal hover accuracy with GPS positioning ranges +/- 0.5 m and +/-1.5 m respectively.

Unmanned Aerial System (UAS) coupled with a Miniaturized Radiometer
The DJI Matrice 600 Pro UAS carries a TerraradTech microwave L-band radiometer as a payload. This portable L-band Radiometer (PoLRA) can read the soil moisture from 5-10 cm and has less than 2% error. The unique antenna of this system provides a temperature correction for the full power of the beam width at 37°. The L-band radiometer is one of the most efficient and cost-effective approaches to measuring soil moisture because of its dual-polarization capabilities. The L-band radiometer is a sub-orbital system that measures soil moisture at a high spatial resolution (e.g. 6 m pixel at 10 m altitude a.g.l.) at a frequency of 1-2GHz which is the most promising approach to measuring soil moisture.

Terrestrial Autonomous Systems
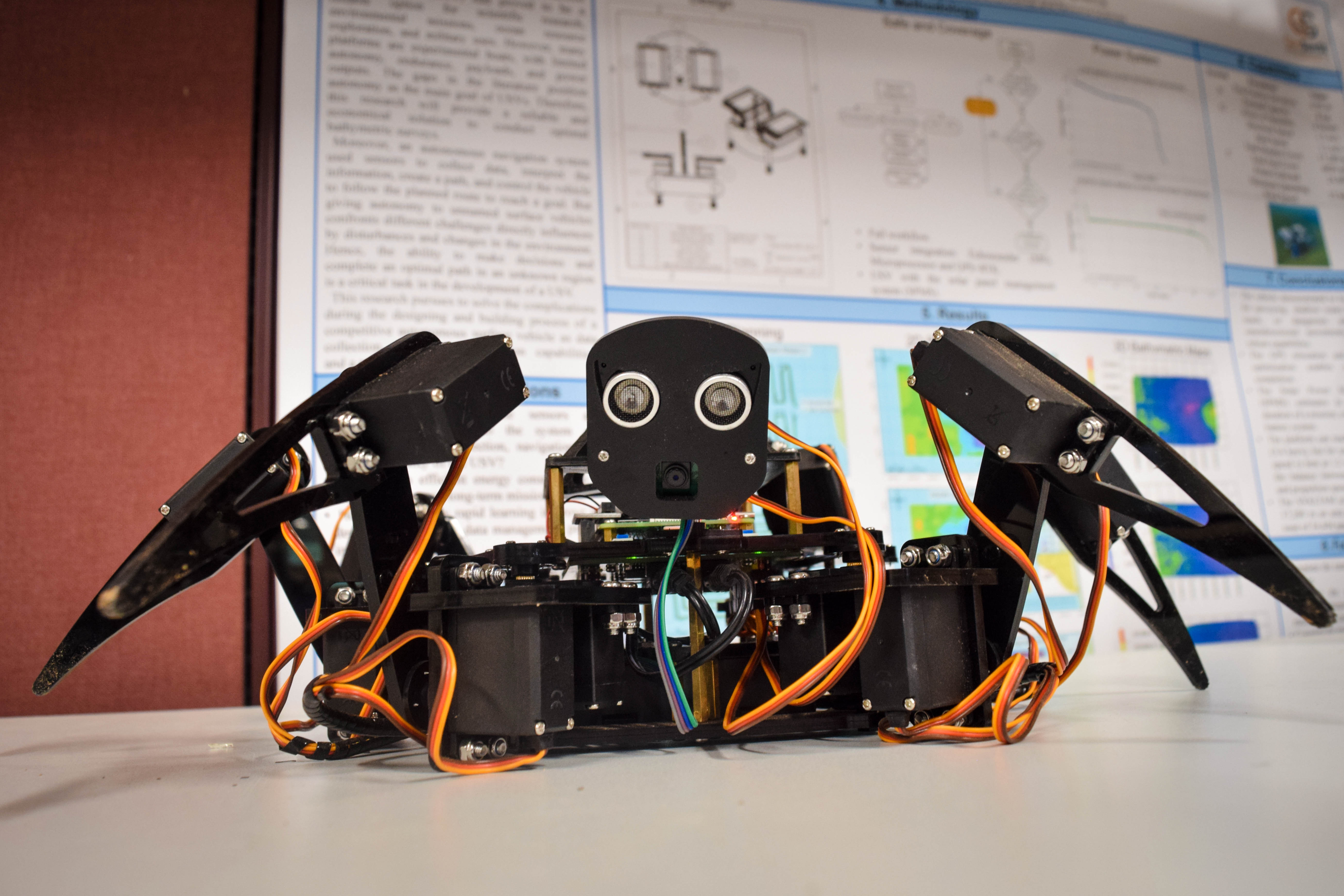
Spiderbot LAI
The Spiderbot LAI is an optimized Freenove Big Hexapod Robot Kit equipped with a 1080p RBG camera with a 180° field of view utilized for taking high-definition hemispherical photography of vegetation in the Jornada Experimental Range. The hemispherical photography is then exported, post-processed, and analyzed through a proprietary software. Moreover, the six-legged device allows for ease of maneuvering tight spaces.
The system is powered through two sets of 18650 rechargeable batteries totaling 7.4V per set for a grand total of 14.8V. One set is responsible for powering the microcontroller unit, and the other two power the motor driver and motors. Using a Raspberry Pi 4 as the microcontroller unit, the Spiderbot LAI has the flexibility of various features one of the most notable being an automated hotspot that allows an external device to connect for controlling privileges and file transfer in areas without internet reception. Furthermore, the Spiderbot also carries a secondary camera and one ultrasonic sensor mounted on a pivoting head which can allow the Spiderbot to recognize its immediate position and orientation.